Ich wollte schon lange einen Hydroponik Tower aus dem 3D-Drucker bauen. Es gibt viele starke HydroTower-Projekte (ja, ich habe mir einiges abgeschaut 😊) – aber ich verfolge einen eigenen Ansatz mit einem entscheidenden Kniff:
👉 Ein Lehrrohr als Sensor-Mast bis ganz nach oben, damit ich Sensorik trocken, sauber und modular montieren kann – ohne außenliegende Kabel und ohne den Turm bei Upgrades komplett zerlegen zu müssen.
Mein langfristiges Ziel ist ein autonomer Hydroponik Tower, der über längere Zeit selbstständig laufen kann: Pflanzen versorgen, Wasser zirkulieren lassen, Zustände überwachen – und später sogar automatisch nachfüllen und düngen.
Realistisch bleibt’s trotzdem: Das ist ein Langzeitprojekt (mit gelegentlichen Pausen wegen Solar-Rennsemmeln 😄).
Was ist ein HydroTower?
Ein HydroTower ist ein vertikales Hydroponik-System: Pflanzen sitzen in einzelnen Modulen bzw. Netztöpfen. Eine Pumpe befördert Wasser/Nährlösung nach oben, von dort fließt sie über Kanäle oder im Inneren wieder nach unten zurück in den Tank.
Vorteile eines Hydroponik Towers:
- extrem platzsparend
- sehr effizient (Wasser/Nährlösung im Kreislauf)
- modular erweiterbar
- macht optisch im Wohnzimmer oder in der Werkstatt richtig was her
Projektziele: Das soll mein 3D-gedruckter Hydroponik Tower können
1) Modular & erweiterbar
- Tower-Module beliebig stapeln
- zusätzliche Etagen einfach nachdrucken und ergänzen
2) Werkzeuglose Montage
- stecken, drehen, abdichten – fertig
- ideal für Reinigung & Wartung
3) Dicht & wartungsfreundlich
- O-Ring-Dichtung (robust, toleranzfreundlich, austauschbar)
- Print-in-Place-Dichtung (weniger Teile, dafür präziser Druck nötig)
4) Smart & langfristig autonom
- Wasserstand überwachen
- Pumpenlaufzeiten intelligent steuern
- später: Nährstoffe nachdosieren + Status senden (z. B. LoRaWAN)
5) Elektrik: Start pragmatisch, später sicherer
- zuerst: 230 V + Netzteil + Schaltuhr (simpel, funktioniert)
- später: 12 V Niedervolt, optional Solar + Akku (flexibler & entspannter)
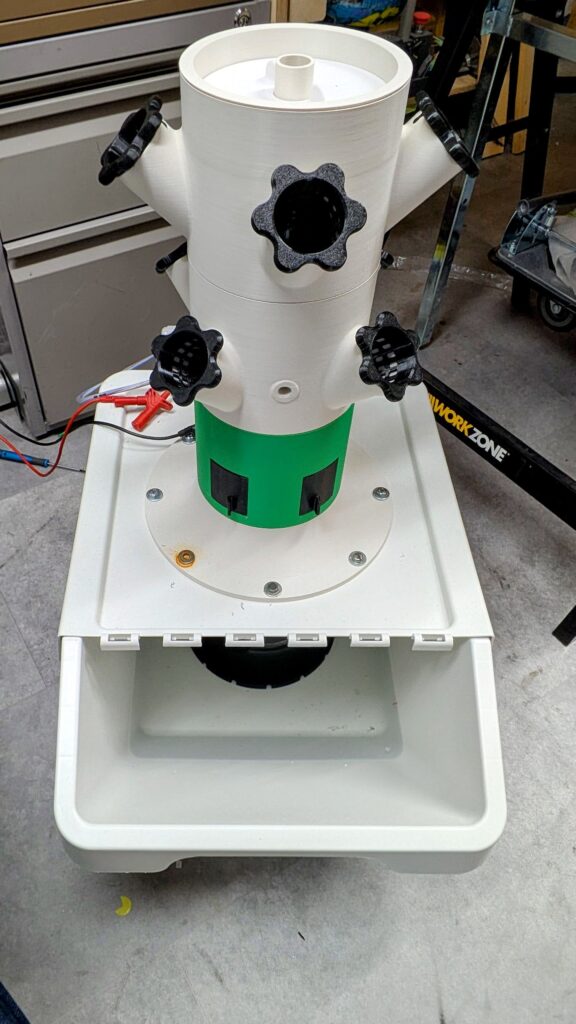
System-Überblick: So ist der HydroTower aufgebaut
- Wassertank/Basis: Tank + Pumpe + anfangs Strom/Schaltuhr, später Elektronik
- Towersegmente: Pflanz-Module mit definiertem Wasserweg
- Deckel/Top-Modul: Wasserverteilung + Zugang zum Lehrrohr
- Lehrrohr / Sensor-Mast: Kabelkanal + Sensor-Mounts, später ggf. LoRa-Antenne
(Bild: Explosionsansicht / Konzept – siehe Downloads unten)
Meilensteine: Vom Starterkit zur Autonomie
Meilenstein 1: Starterkit (läuft, dicht, bepflanzbar)
Ziel: Ein HydroTower, der mechanisch funktioniert, dicht ist und Pflanzen aufnehmen kann.
Starterkit-Komponenten
- Wasserspeier/Verteiler (oben oder im Deckel)
- Pumpenhalterung (vibrationsarm, servicefreundlich)
- Tower-Module (stapelbar, definierter Wasserlauf)
- Pflanzensätze (Netztopf-Aufnahmen / Inserts)
- 230 V-Netzteil + Steckdosen + Schaltuhr
- werkzeuglose Montage (Bajonett/Clip/Vierteldrehung)
Dicht-Varianten im Vergleich
- O-Ring-Dichtung: zuverlässig, austauschbar, toleranzfreundlich
- Print-in-Place: keine Extra-Teile, schnelle Montage – braucht aber saubere Druckparameter & passende Toleranzen
Meilenstein 2: ESP32-Steuerung (Pumpe smart schalten)
Ziel: Die Pumpe läuft zeit- und zustandsabhängig über einen ESP32.
Geplanter Funktionsumfang
- Pumpensteuerung (Intervall, Nachtmodus, manuell)
- erste Sensorik (Low-Cost Einstieg):
- Wasserstand (Schwimmer/kapazitiv/Druck/Ultraschall)
- Wassertemperatur (z. B. DS18B20)
- Leck-/Feuchtesensor (Failsafe)
- optional: Status-LED oder kleines Display
Warum der Sensor-Mast das Herzstück ist
- Sensoren oben montieren (Temp/Luft/Licht)
- Kabel im Inneren führen
- Sensoren später tauschen, ohne den Tower zu zerlegen
Meilenstein 3: Autonom (Nachfüllen, Düngen, LoRaWAN)
Ziel: Der Hydroponik Tower läuft über längere Zeit selbstständig.
Automatisches Nachfüllen
- Magnetventil oder Nachfüllpumpe
- Sicherheitslogik:
- Max-Laufzeit
- redundante Wasserstandsmessung
- Lecksensor als Not-Aus
Düngung / “Abgleichen”
- einfach: Dosierpumpe nach Zeit/Schätzung
- besser: Dosierung nach EC/Leitfähigkeit (optional pH)
- pro: Kalibrierung + Logging für Langzeitstabilität
Status & Kommunikation (LoRaWAN)
- Wasserstand, Pumpenstatus, Temperatur, Wartungshinweise
- stromsparend + große Reichweite (ideal für Remote-Status)
Typische Hydroponik-Probleme (und wie ich sie einplane)
Damit „autonom“ nicht nach 10 Tagen „grün, schleimig und verstopft“ bedeutet:
- Reinigung & Wartung: schnell zerlegbar, glatte Wasserwege
- Algenprävention: lichtdichte Bereiche (Material/Wandstärke/Abdeckung)
- Verstopfungen: Vorfilter an der Pumpe + Zugriff auf kritische Stellen
Open Source: Dateien frei – mit fairer Option für Teile
Ich möchte alles frei verfügbar machen:
- STL/STEP-Dateien
- BOM/Stückliste
- Druckprofile/Empfehlungen
- ESP32-Firmware
- Build-Anleitung
Zusätzlich soll es eine Option geben, Teile bei mir zu beziehen (gedruckte Module, Dichtsets, O-Ringe, Elektronik-Bundles) – sofern Reglemente/Vorschriften das sinnvoll zulassen.
FAQ: Hydroponik Tower aus dem 3D-Drucker
Ist ein 3D-gedruckter Hydroponik Tower dicht genug?
Ja – mit sauberer Passung und geeignetem Dichtkonzept. O-Ringe sind toleranzfreundlich, Print-in-Place spart Teile, braucht aber präziseren Druck.
Welche Elektrik ist besser: 230 V oder 12 V?
Für den Start ist 230 V + Schaltuhr praktisch. Langfristig ist 12 V (optional Solar + Akku) meist sicherer, flexibler und leichter integrierbar.
Welche Sensoren lohnen sich am Anfang?
Wasserstand, Wassertemperatur und ein Leck-/Feuchtesensor – das sind die besten „ersten drei“, weil sie Stabilität und Sicherheit sofort erhöhen.
Call to Action: Mitbauen erwünscht!
Welche Pflanzen würdest du im Tower testen – Salat, Kräuter, Erdbeeren?
Welche Dichtvariante würdest du wählen – O-Ring oder Print-in-Place?
Und welche Sensoren sind für dich „Must-have“?
Ich dokumentiere das als Projekt-Log – mit Downloads, Bildern, Tests und natürlich den Momenten, in denen es nicht auf Anhieb klappt. 😉