März 2026
Ein kurzes Update zur Terminvorschau 2026
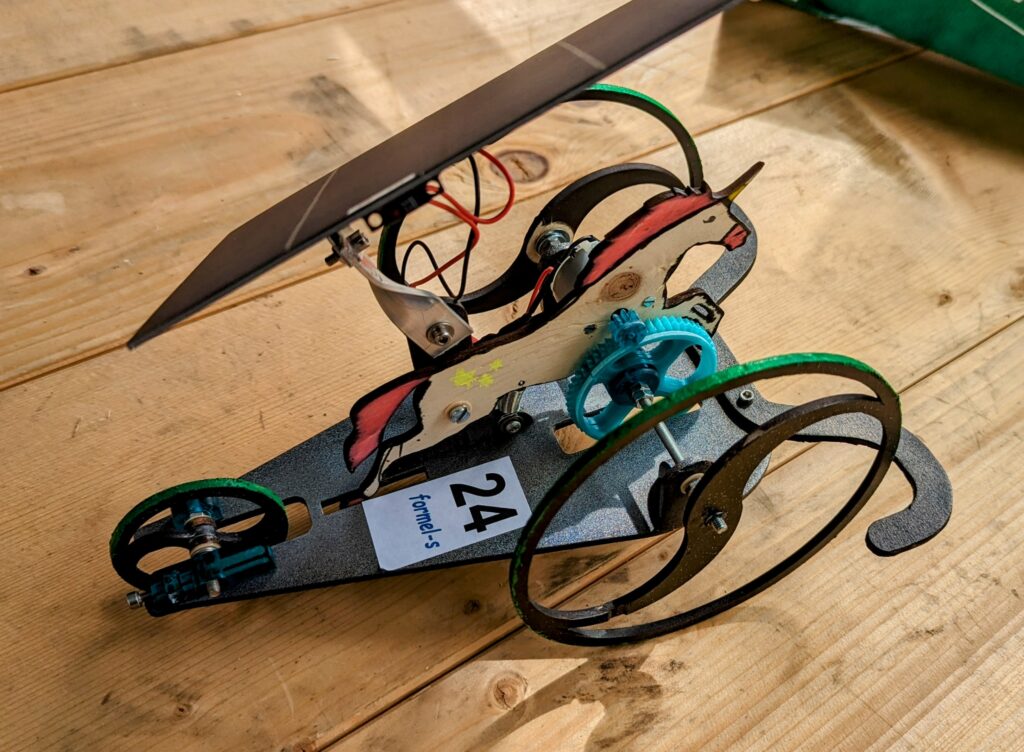
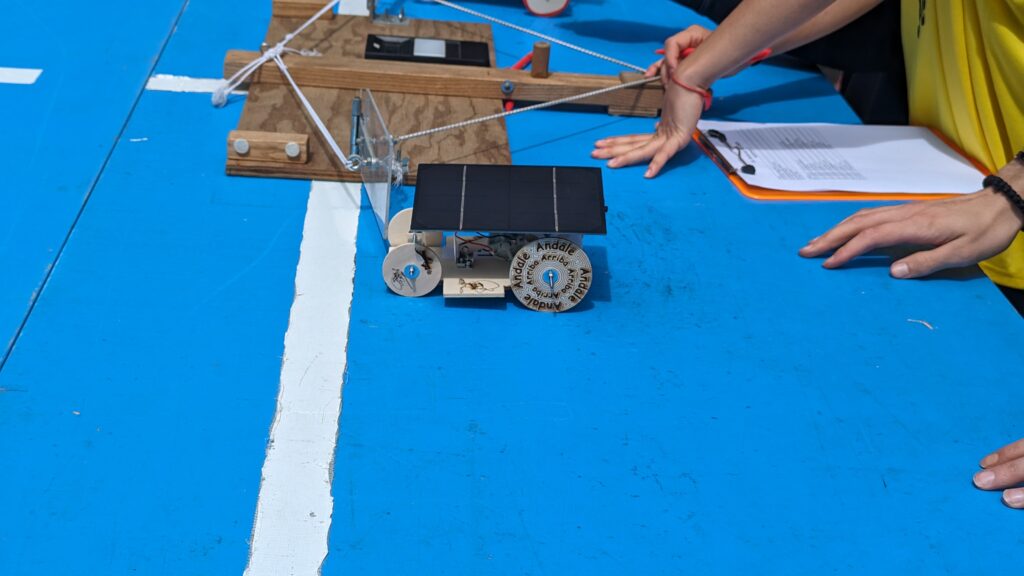
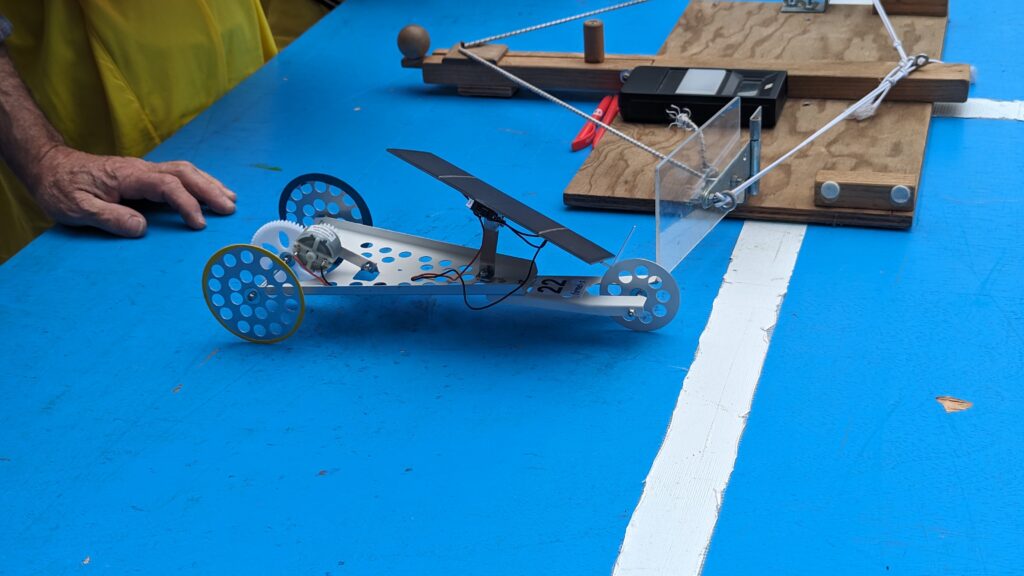
Im letzten Beitrag hatte ich euch die geplanten Highlights für 2026 vorgestellt – und wie das so ist mit Plänen: Manchmal kommt es anders als gedacht. Leider müssen wir beim Thema Solarrennen eine wichtige Anpassung vornehmen.
Das Solarrennen Seeland überschneidet sich terminlich mit der Maker Faire Hannover (15.–16. August 2026), und da wir dort als Aussteller fix eingeplant sind, hat die Maker Faire klar Priorität. Die direkte Folge davon: Dieses Jahr werden wir keinen Solarrennwagen für die Formel-S bauen. Das ist schade, aber die Doppelbelastung wäre schlicht nicht machbar gewesen.
Komplett beerdigt ist das Thema aber nicht – es könnte sein, dass es das ein oder andere konzeptionelle Vorarbeit geben wird. Mal schauen, was die Zeit hergibt.
Hydrotower – aktueller Stand
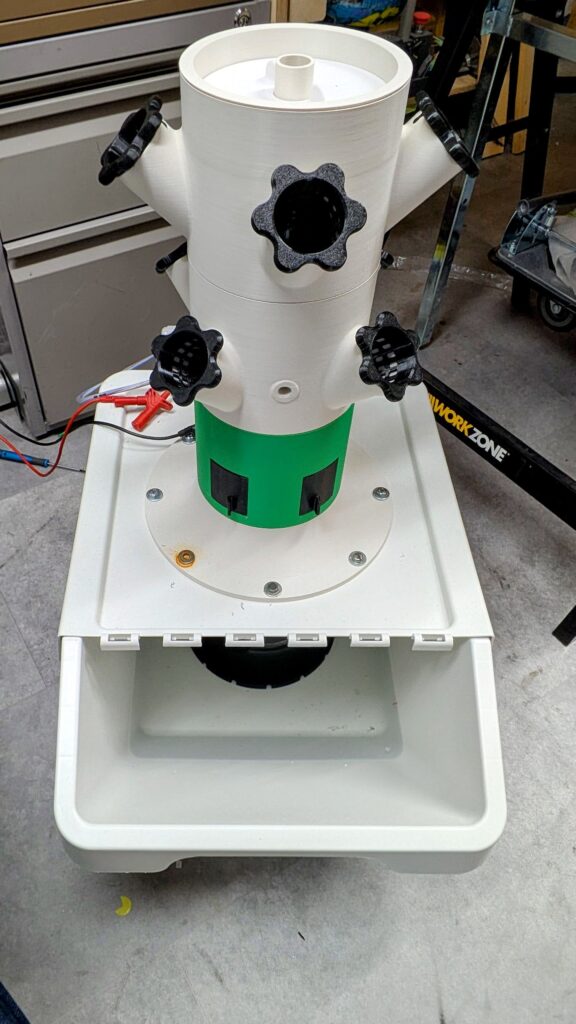
Jetzt aber zu einem Projekt, das gerade richtig Fahrt aufnimmt: dem Hydrotower!
Der Funktionstest des Grundkonzepts ist erfolgreich abgeschlossen – das Prinzip funktioniert, und ich bin sehr zufrieden damit, wie sich das Ganze entwickelt. Die ersten Teile wurden bereits in PETG gedruckt und haben den Praxistest bestanden. PETG ist für ein Hydroponik-Projekt natürlich die richtige Wahl: wasserbeständig, stabil und langlebig.
Momentan liegt das Projekt kurz auf Eis, weil das Filament aufgebraucht ist – neues Material ist aber bereits bestellt (bei 3D-Jack ← Affiliate-Link). Sobald das ankommt, geht es direkt weiter mit den nächsten Teilen und dem Feinschliff am Design.
Ein vollständiger Bericht mit Bildern, Learnings und den gedruckten Komponenten folgt, wenn die nächste Bauphase abgeschlossen ist. Bleibt also dran!
Nebenprojekte: Masterspule & LEGO-Ersatzteile
Weil mir ein Projekt gleichzeitig offensichtlich nie reicht, laufen parallel noch zwei weitere Dinge:
Masterspule mit RFID für den Snapmaker U1 – Ich arbeite an einer Masterspule, die mit wechselbaren RFID-Chips ausgestattet ist. Das Ziel: AzureFilm Refill-Filamente so präparieren, dass sie vom Snapmaker U1 korrekt erkannt werden. Das Design ist bereits zu einem grossen Teil gezeichnet – mehr dazu, sobald die ersten Tests laufen.

LEGO-Ersatzteile für einen Bulldozer von 1986 – Das ist ein kleines Herzensprojekt: Ich drucke Ersatzteile für den LEGO Bulldozer Set 6658 von 1986. Die Schaufel hat damals wohl einiges mitgemacht – jetzt bekommt sie endlich Ersatz. Und weil ich schon mal dabei bin: Es gibt auch gleich ein paar zusätzliche Palettengabeln und ein Raumschild obendrauf. Einfach weil ich es kann. 😄
Ausblick: Was steht noch an?
Baumgeist & Etsy-Shop – Die grüne Variante des beleuchteten Waldgeist-Nachtlichts ist fertig, die blaue Variante ist in Arbeit. Der Etsy-Shop von Let’s build things steht kurz vor dem Launch – ich bin gespannt, wie die ersten Listings ankommen!
Maker Faire Vorbereitungen – Im Juni bin ich als Aussteller an der Maker Faire Solothurn dabei, im August folgt die Maker Faire Hannover. Die Vorbereitungen laufen bereits im Hintergrund, und ich werde euch auf dem Laufenden halten, was ich diesmal mitbringe und zeige.
Stream-Hinweis: Ostern pausieren wir
Über die Osterfeiertage wird es keinen Stream geben – ich gönne mir eine kleine Auszeit. Danach geht’s aber wieder los, und es gibt sicher einiges zu zeigen!
Das war’s für heute – kurzes Update, aber ein wichtiges. Falls ihr Fragen habt, schreibt es gerne in die Kommentare. Ich freue mich immer über den Austausch mit euch!
Bis bald – Let’s build things! 🛠️